Locomotion and Gait Analysis of Multi-Limb Soft Robots IEEE Spectrum 1:08 5 years ago 1 534 Скачать Далее
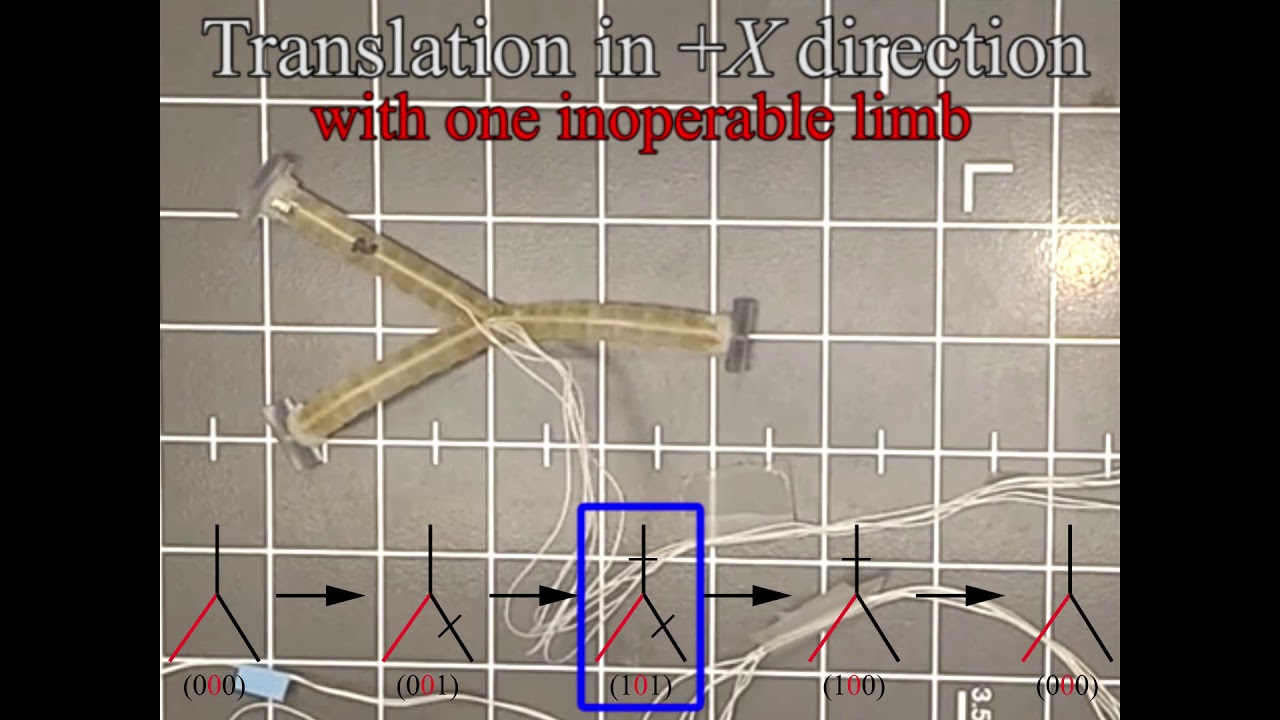
Multi-gait Locomotion Planning and Tracking for Tendon-actuated Terrestrial Soft Robot (TerreSoRo) Agile Robotics Lab at University of Alabama 1:16 1 year ago 159 Скачать Далее
Model-free control framework for multi-limb soft robots Agile Robotics Lab at University of Alabama 2:12 4 years ago 83 Скачать Далее
Robot caterpillar demonstrates new approach to locomotion for soft robotics Science X: Phys.org, Medical Xpress, Tech Xplore 0:44 1 year ago 8 354 Скачать Далее
Soft Robot - Tetrahedral soft legged robot for multi gait locomotion Gilbert Wang 1:27 3 years ago 1 143 Скачать Далее
Study on Soft Robotic Pinniped Locomotion Dimuthu D. K. Arachchige 2:35 1 year ago 1 795 Скачать Далее
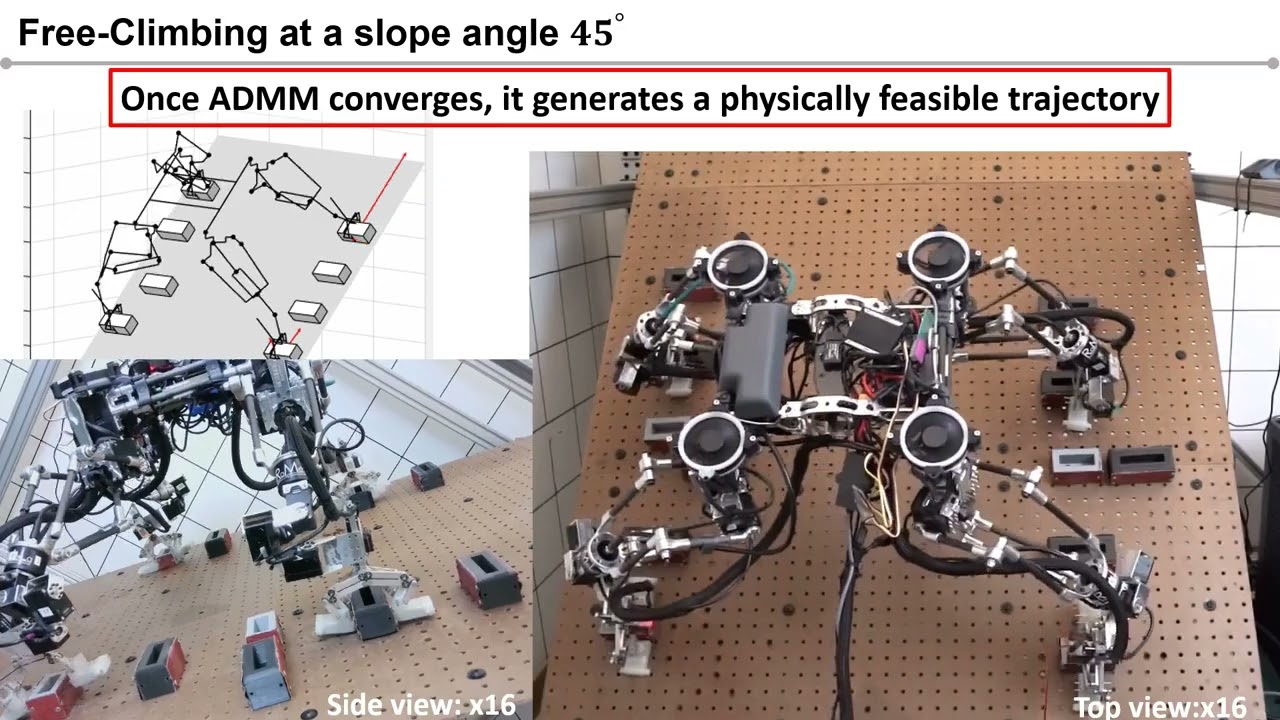
Teaser: Contact-Rich Grasping & Locomotion via Distributed Optimization for Multi-Limbed Robots RoMeLa 0:59 1 year ago 2 455 Скачать Далее
Model-free control framework for multi-limb soft robots Vishesh Vikas 1:10 8 years ago 353 Скачать Далее
Soft Robotics Locomotion Challenge: Kangaroo-Tail-Inspired Soft Robot Raye Lab 1:06 1 year ago 423 Скачать Далее
Simultaneous Contact, Gait and Motion Planning for Robust Multi-Legged Locomotion via MIP (RAL'18) Dynamic Legged Systems lab 3:48 6 years ago 1 346 Скачать Далее
Quadrupedal walking of Multi-Locomotion Robot RoboticsLab NagoyaUniv 1:16 9 years ago 545 Скачать Далее
Electronics-free pneumatic soft-legged robot demonstrator Necrobioarchetype 1:23 2 years ago 98 Скачать Далее
Autonomous Locomotion Trajectory Shaping and Intelligent Control for Lower-Limb Exoskeletons Mahdi Tavakoli 0:23 2 years ago 220 Скачать Далее